Intelligent Picking Bot
Project Description
This problem statement tries to replicate the quintessential warehouse problem of picking in which the
participants are supposed to build their own robot hardware and software (collectively, a “Robot”) that is
capable of doing general tasks of picking items from a pick area and place them into a cell in th drop/stow
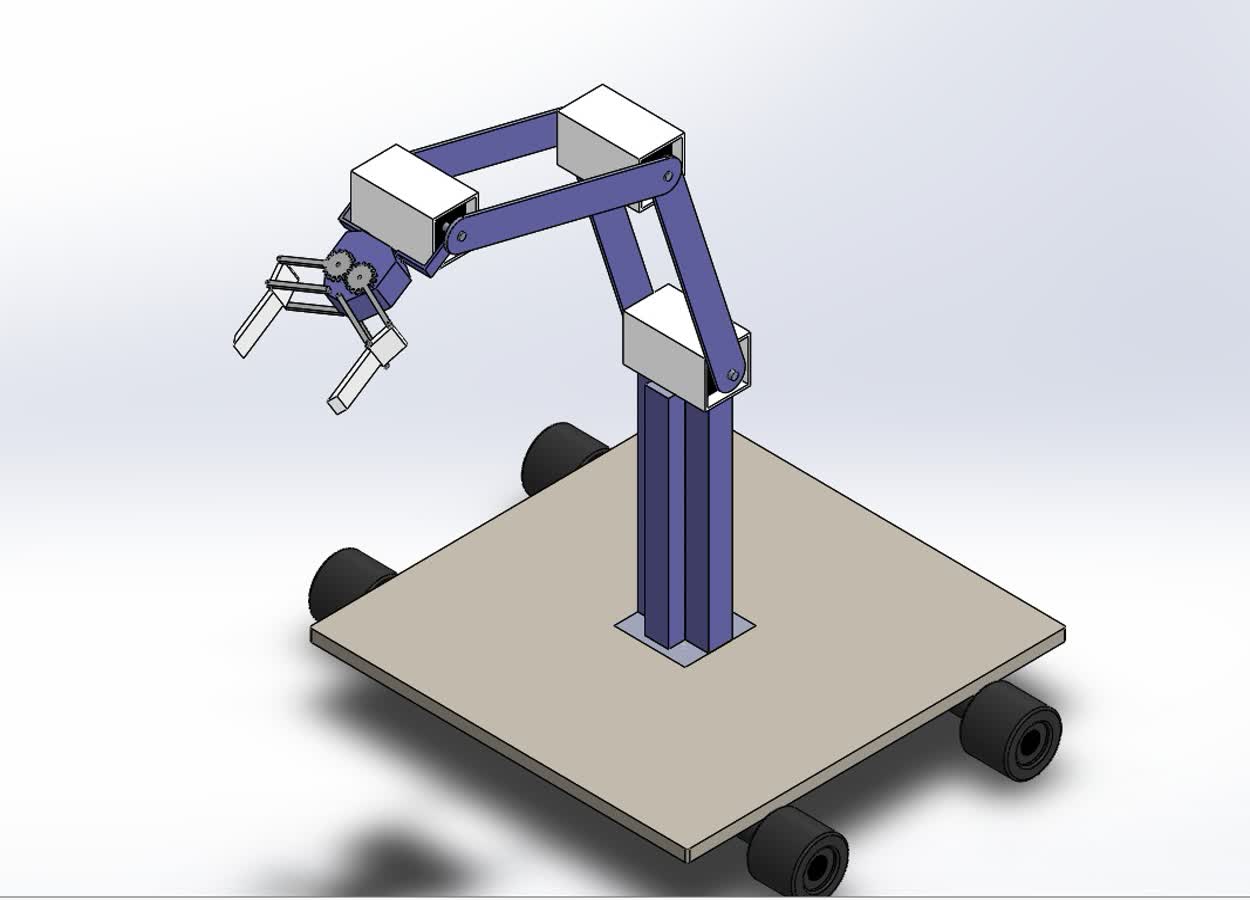
area. There are few households objects at a height of 100cm from the ground on a table, which is termed as the pick up area. We have to design a mechanism which can
pick up these objects and then put them in a stow area in a particular manner.
Problem statement
My contributions
- Created the dataset for object detection by using variuos transformations and filtering techniques on household objects
- Used YOLO algorithm for object detection and openCV techniques for detecting the grasp point of the object
- Built a custom bot in gazebo which mapped the area around the picking and stowing area
- Used A* algorithm for finding the optimal path planning between pick and stow positions
- Aided in building the robotic arm and simulating it on Rviz using MoveIT package